



중국과학원 자동화 연구소 팀은 전력선 순찰을 수행하는 혼합형 로봇의 궤적 계획 방법을 처음으로 제안하였습니다. 이 방법은 50밀리초 이내에 궤적을 생성하여 혼합형 로봇의 자율 착지 및 장애물 극복 시간을 현저히 단축시킵니다. 관련 연구 논문 "Model-Based Trajectory Planning of a Hybrid Robot for Powerline Inspection"은 IEEE RAL과 IROS 2024에 게재 승인되었습니다.
NOKOV 모션 캡처 시스템은 하이브리드 로봇의 상태를 추정할 수 있는 고정밀 위치 데이터를 연구에 제공하여 실제 환경에서 제안된 방법의 효과를 검증하는 데 도움을 줍니다.
인용 형식
Z. Li et al., "Model-Based Trajectory Planning of a Hybrid Robot for Powerline Inspection," in IEEE Robotics and Automation Letters, vol. 9, no. 4, pp. 3443-3450, April 2024, doi: 10.1109/LRA.2024.3363535.
연구 배경
정기적인 전력선 검사는 전력의 안전하고 신뢰성 있는 전송을 보장하고, 위험을 예방하며, 전력망의 효율성을 최적화하는 데 필수적입니다. 클라이밍 로봇은 전력선을 따라 이동하여 고정밀 및 장거리 검사를 가능케 하지만, 장애물 회피에 어려움을 겪고 있습니다. 드론은 전력선을 비행하여 검사를 수행할 수 있어 높은 유연성을 제공하지만, 배터리 지속 시간이 제한적입니다. 혼합형 로봇은 클라이밍 로봇과 드론의 장점을 결합하여 높은 기동성과 장시간의 지속 가능성을 목표로 합니다.
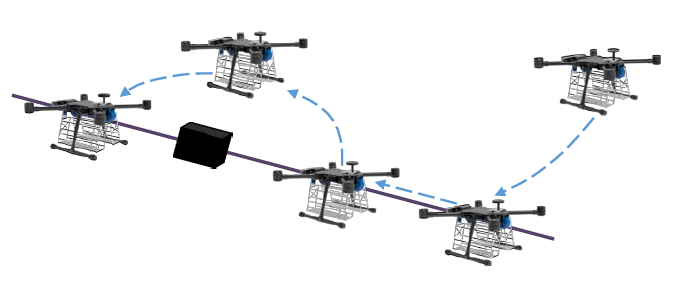
혼합형 로봇 전력선 순찰 프로세스 개념도
그러나 혼합형 로봇 관련 연구는 주로 플랫폼 설계와 자율 착륙에 집중되어 있으며, 궤적 계획에 대한 관심이 부족하여 이는 혼합형 로봇의 자율 순찰을 실현하는 데 있어 핵심입니다. 본 논문은 이러한 궤적 계획의 공백을 채우기 위한 새로운 방법을 제안합니다. 궤적 계획 문제를 비선형 계획 문제로 모델링하여 동적 및 기하학적 제약을 하드 제약으로 설정하고, 검사 품질을 최적화 비용 함수로 삼아 충분한 시뮬레이션 실험과 실제 실험을 통해 방법의 유효성을 검증하였습니다.
논문의 기여
1. 혼합형 로봇 전력선 검사를 위한 궤적 생성 방법을 제안하여 착륙 및 장애물 회피 네비게이션의 시간 비용을 대폭 감소시켰습니다.
2. 혼합형 로봇 전력선 검사를 위한 일반적인 기하학 모델을 제안하였으며, 정확한 착륙 및 전력선 가시성 극대화를 위한 해석 공식을 포함합니다.
3. 충분한 시뮬레이션 실험과 실제 실험을 통해 제안된 방법의 유효성을 검증하였습니다.
실험 절차
연구팀은 제안한 궤적 계획 방법을 하이브리드 로봇 플랫폼에서 검증했는데, 로봇의 위치 데이터, 전력선, 장애물은 NOKOV 모션 캡처 시스템으로 수집하고 로봇 상태 추정은 확장 칼만 필터(EKF)로 수행했습니다.
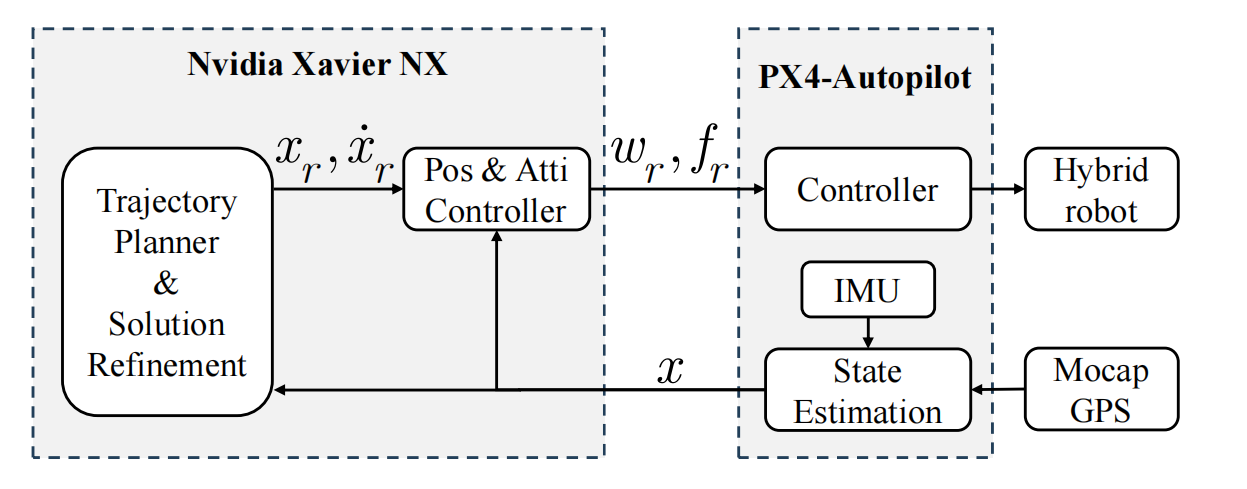
하이브리드 로봇 시스템 프레임워크
연구진은 실제 환경에서 이 방법의 유효성을 검증하기 위해 실내에 송전선과 장애물이 있는 모의 송전 시나리오를 구축하고 궤적 계획 및 궤적 추적 실험을 진행했습니다.
실험 결과, 계획된 궤적은 로봇이 항상 송전선 바로 위와 정렬을 유지하고 송전선의 가시성을 극대화하며 궁극적으로 로봇이 장애물을 통과하여 송전선 위에 성공적으로 착륙할 수 있음을 보여주었습니다.
NOKOV 모션 캡처 시스템은 하이브리드 로봇의 상태를 추정하는 데 도움이 되는 고정밀 위치 데이터를 제공하여 실제 환경에서 위의 궤적 계획 방법의 효과를 검증합니다.
저자 소개
지슈오 리는 중국과학원 자동화연구소 산업 비전 및 지능형 장비 기술 공학 연구실의 박사 과정 학생입니다.
중국과학원 자동화연구소 산업 비전 및 지능형 장비 기술 엔지니어링 연구실의 부연구원인 Yunong Tian은 특수 로봇 공학, 구현 지능 및 시각 서보에 대한 주요 연구 분야를 연구하고 있습니다.
중국 과학원 자동화 연구소 산업 비전 및 지능형 장비 기술 엔지니어링 연구소의 연구원 Guodong Yang은 로봇 공학 및 무인 자율 시스템 연구 및 응용을 주요 연구 분야로 삼고 있으며, 중국 과학원 자동화 연구소 산업 비전 및 지능형 장비 기술 엔지니어링 연구소의 연구원입니다.
얀펑 장, 중국과학원 자동화연구소 멀티모달 인공지능 시스템 국가핵심실험실 박사 후보, 주요 연구 분야: 로봇공학 및 무인 자율 시스템 연구 및 응용.
En Li, 중국과학원 자동화연구소 산업 비전 및 지능형 장비 기술 엔지니어링 연구실 연구원, 주요 연구 분야는 특수 로봇 공학, 로봇 제어 기술, 지능형 감지 기술 연구 및 응용입니다.
중국과학원 자동화연구소 복합 인공지능 시스템 국가핵심실험실 연구원으로 첨단 제조를 주요 연구 분야로 삼고 있습니다.
민 탄은 중국과학원 자동화연구소 복합 인공지능 시스템 국가 중점 연구소의 연구원이며, 주요 연구 분야는 지능형 로봇과 첨단 제어입니다.





































































































문의하기
-
우리는 항상 귀하의 질문에 답변하고 더 많은 정보를 제공하게 되어 기쁩니다.
문제에 대해 알려주시면 최상의 솔루션을 안내해 드리겠습니다.
-
-
- 캡처 볼륨 * m m m
-
선택 해주세요 *
- 제안 수 (옵션)
-
카메라 유형(선택 사항)
-
카메라 수(선택 사항)
- 제출하다